



4X4港口車自動駕駛系統
文章來源:中(zhong)國(guo)第一汽車集(ji)團有限公司 發布(bu)時(shi)間:2025-02-28
【成果簡介】
面向港口作業場景,以4×4港口車為載體,突破高精度融合定位、車輛精準控制等多項技術,構建智能駕駛系統完整解決方案,支撐港口智慧物流一體化運營方案落地。
高精度融合定位技術:采用RTK、視覺和激光雷達融合定位,實現港口內全區域定位精度≤5cm;
基于動力學模型的車輛控制技術:設計4×4平板車動力學模型,采用基于模型預測控制技術,實現車輛橫縱向控制精度≤10cm;
全輪轉向控制技術:通過全輪轉向,實現“蟹行”,減小轉彎半徑,提升整車行駛靈活性;
L4級智能駕駛技術:港口場景內實現無人駕駛,支持與人工駕駛車輛混流運行,基礎設施零改造,通過自主開發的運營調度系統,實現與港口TOS系統對接,提升運營效率,提供一體化物流解決方案。
【主要指標】
(一)定位精度:≤5cm
(二)車輛橫向控制精度:≤10cm
(三)車輛縱向控制精度:≤10cm
【應用推廣需求】
(一)應用推廣方式:合作實施
(二)應用推廣領域:港口碼頭等集裝箱運輸領域
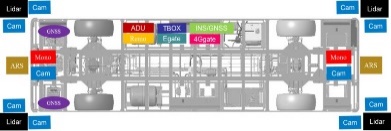
【成果圖片】

【聯系人】
集團聯系人:李子玉,17643147067,liziyu@faw.com.cn
成果聯系人:趙彬,13756292032,zhaobin1@rdc.faw.com.cn
【責任編(bian)輯:梁詠詩(shi)】
掃一掃在手機打開當前頁
